-

工業機器人是面向工業領域的多關節機械手或多自由度的機器裝置,它能自動執行工作,是靠自身動力和控制能力來實現各種功能的一種機器。它可以接受人類指揮,也可以按照預先編排的程序運行,現代的工業機器人還可以根據人工智能技術制定的原則綱領行動。 [詳情]
-

澳大利亞名為SPEE3D的創業公司力求通過獨特的金屬沉積方法提升金屬3D打印速度。SPEE3D的LIGHTSPEE3D3D打印機采用超音速沉積技術,據稱以比其他金屬3D打印技術快100倍以上的速度。因此,該技術可以在10分鐘內完成3D打印基本的金屬零件。 [詳情]
-

選擇車輪需要考慮多種因素,如機器人的尺寸、重量、地形狀況、電機功率等等,當然,也需要考慮到美觀。 [詳情]
-

激光表面處理技術,能使低等級材料實現高性能表面改性,達到零件制造低成本與工作表面高性能的最佳組合,具有可觀的經濟效益和社會效益。 [詳情]
-
正在尋求降低制造成本、同時滿足小型化加工挑戰的批量制造商們,可使用單模光纖激光打標機在一系列材料(包括鋼、鎳、鈦、硅、鋁和銅)上實現出色的加工效果。 [詳情]
-

2012 年,谷歌公開其無人車的成本: 15 萬美元(約合人民幣 96 萬元)。對無人駕駛汽車來說,其中最貴的元器件是激光雷達。谷歌使用的是由 Velodyne 開發的 64 線激光雷達,售價高達 7.5 萬美元,占整車價格一半。 [詳情]
-
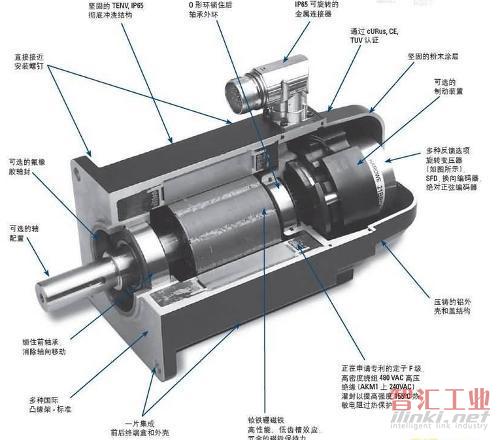
電動機從獲得指令信號到完成指令所要求的工作狀態的時間應短。響應指令信號的時間愈短,電伺服系統的靈敏性愈高,快速響應性能愈好,一般是以伺服電動機的機電時間常數的大小來說明伺服電動機快速響應的性能。 [詳情]
-
雙極性步進電機包含兩繞組,為了使電機運行平穩,不斷的給這兩個線圈加以相位差90度的正弦波,步進電機就開始轉動起來。 [詳情]
-

判斷激光切割機切割質量的好壞,是最直觀斷定激光切割設備性能的最好方式,這里給大家列出了一些判定的九大標準。 [詳情]
-

三分車工七分刀具,想干好車床首先磨刀水平要過硬,再就是多干多練,外圓、內孔、長度、錐度、螺紋的結合練習,再就是復雜零件的車削練習,如:內外梯形螺紋、蝸桿、細長軸、薄壁套等,并學會使用中心架和跟刀架。 [詳情]
-
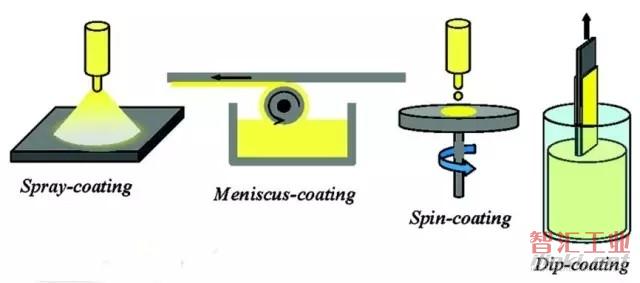
光學薄膜是所有光學器件不可或缺的功能材料,沒有高質量的光學薄膜,光學儀器甚至無法使用。由于溶膠-凝膠膜具有耐激光損傷閾值高的突出優點,經過二十多年的發展,溶膠-凝膠化學法成為了高能量激光器光學系統的首選鍍膜方法。 [詳情]
-
貼片加工中虛焊是最常見的一種缺陷。有時在焊接以后看上去似乎將前后的鋼帶焊在一起,但實際上沒有達到融為一體的程度,結合面的強度很低,焊縫在生產線上要經過各種復雜的工藝過程,特別是要經過高溫的爐區和高張力的拉矯區,所以虛焊的焊縫在生產線上極易造成斷帶事故,給生產線正常運行帶來很大的影響。 [詳情]
-

由于地形地貌和人類工程活動等原因,國內部分地區山體滑坡事故頻發,共發育有大型滑坡140余處,較大滑坡2212處以上。 [詳情]
-
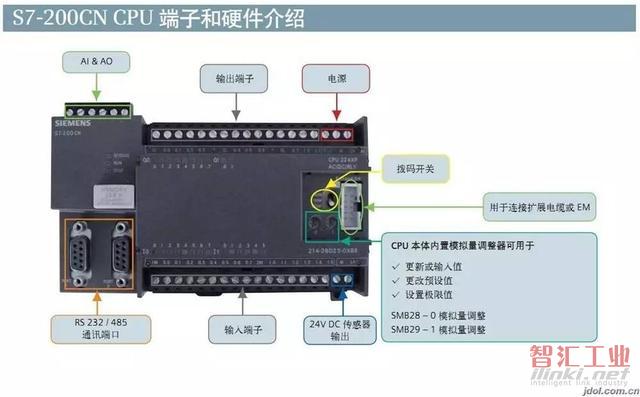
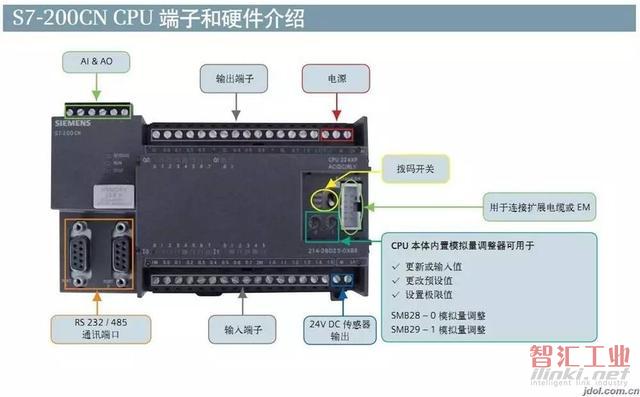
寫點純理論的東西,最近一直在思考怎么跟零基礎的人講PLC。也就是當你面對一個門外漢時,怎么 讓他對PLC感興趣,然后慢慢的帶著學習PLC。思考了很多,又把學校的里的課本找了出來,試著回憶自己怎么入門的。 [詳情]
-

如果對移動機器人視覺算法進行拆解,你就會發現獲取物體深度信息、定位導航以及壁障等都是基于不同的視覺算法,本文就帶大家聊一聊幾種不同但又必不可少的視覺算法組成。 [詳情]



